
Investigación
01
Aquí tenemos dos entornos más o menos establecidos: el rural y el urbano, siendo este último más manejable con entornos bien definidos. Por otro lado, la naturaleza de los entornos rurales incluye la ausencia de edificios circundantes, carreteras estructuradas, señales y cielos despejados. Así, se debe utilizar un conjunto de paradigmas de localización para producir lecturas de alta precisión. Uno de los más importantes es la localización basada en el GNSS, con correcciones RTK o diferenciales, pues ciertos obstáculos y montañas pueden disminuir la precisión de las lecturas del sensor.
Otros métodos comprenden lecturas LiDAR, la comparación de mapas u odometría visual con el uso de cámaras.
Buena localización significa buen control
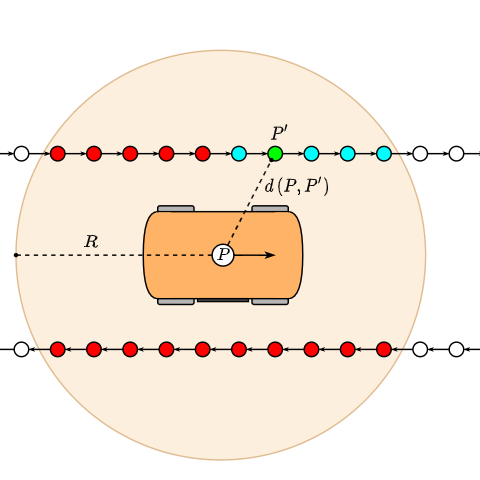
Una buena localización proporciona al vehículo información suficiente para ser controlado adecuadamente, además, puede ayudar a resolver pequeños problemas de decisión sobre qué hacer a continuación y cómo plantearse una situación determinada.
Esta tecnología, basada en la robótica móvil, posiciona la movilidad automatizada como piedra angular del transporte del futuro, abordando retos como la congestión del tráfico, los accidentes de carretera y la experiencia de los pasajeros. Principalmente, porque es el primer problema que hay que resolver si el vehículo necesita conocer los puntos de partida y llegada para la planificación, la toma de decisiones y el control de la percepción.
Descripción Robótica
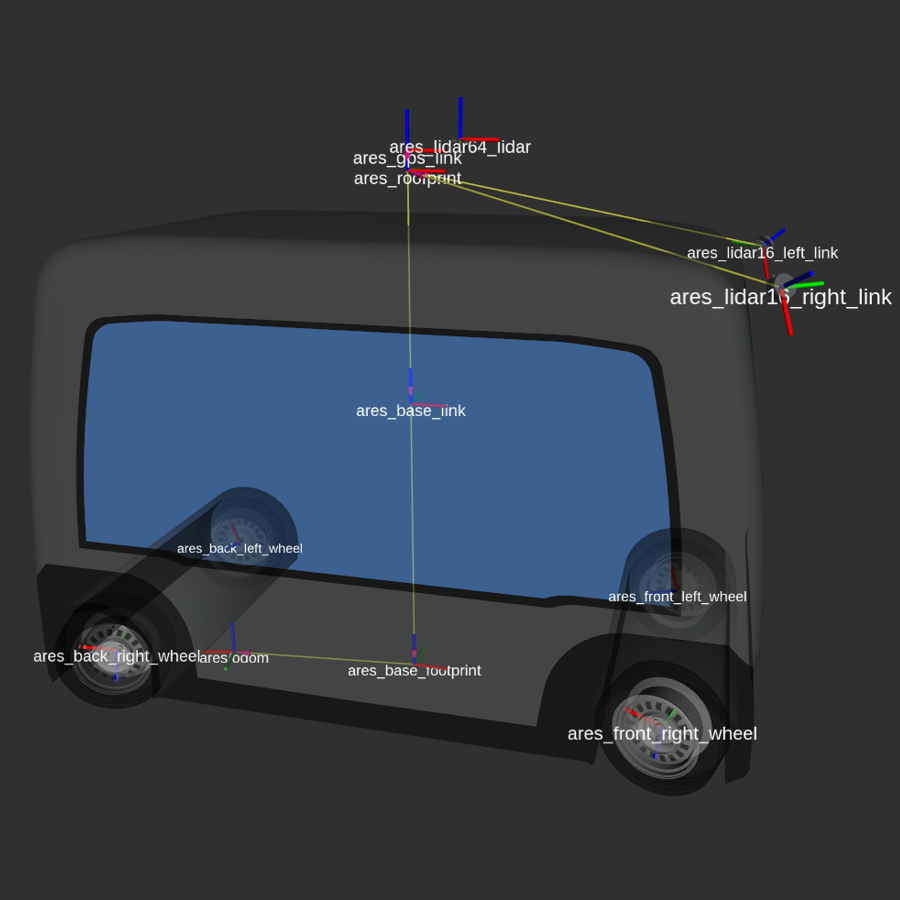
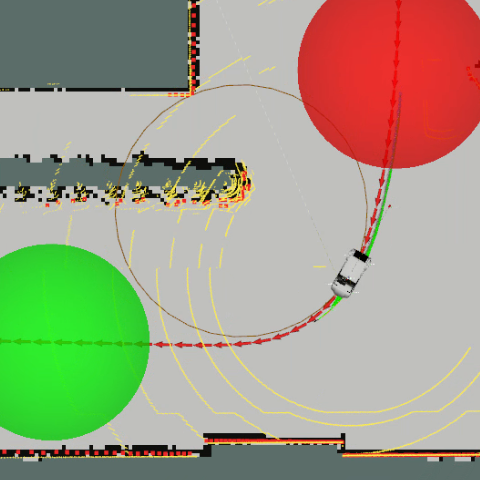
Para localizar un vehículo es necesario ciertos sistemas de coordenadas que permiten saber dónde está cada parte del vehículo: Ruedas, sensores, etc.
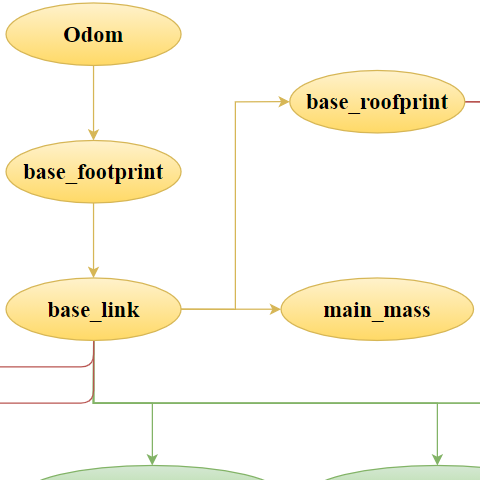
Sistemas de Coordenadas
El árbol de los sistemas de coordenadas nos permite conocer la relación entre ellos y sus cambios a lo largo del tiempo.
Localización con respecto a...
Todas las medidas son relativas al sistema en el que se registran las lecturas. Éstas deben ser transformadas a un sistema global.
02
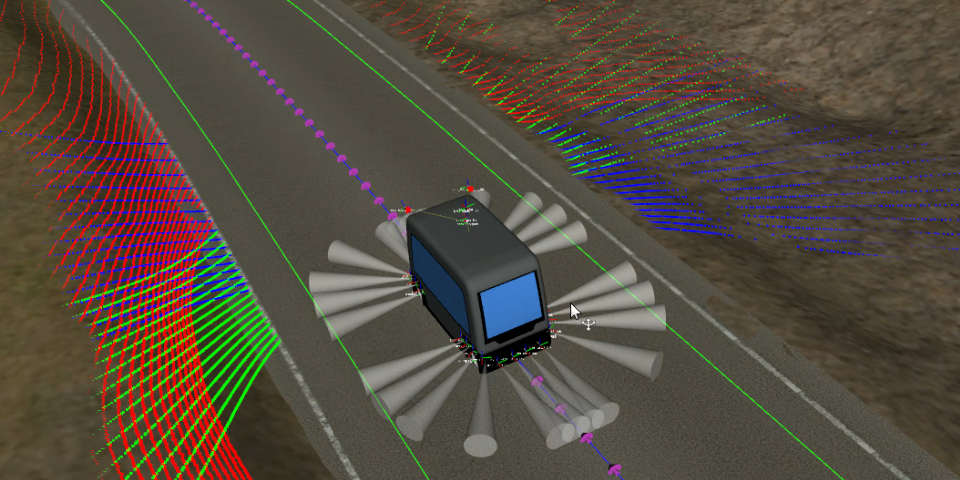
La comprensión e interpretación de la escena de tráfico, en la que se encuentra un vehículo en movimiento, resulta ser un objetivo relativamente complejo y requiere inevitablemente un proceso de inferencia avanzado. Debe partirse de una percepción fiable de los distintos agentes que forman parte de la escena (vehículos, peatones, obstáculos, etc.), así como de las características de la infraestructura en la que se mueve el vehículo (límites de la carretera, geometría de las intersecciones, etc.). Para resolver estos problemas se pueden utilizar enfoques de visión por computador y tecnologías LiDAR.
Esto incluye tareas como el mapeo, la detección de obstáculos, la detección de carretera y el procesamiento de datos, lo que permitiría al vehículo saber qué hay a su alrededor.
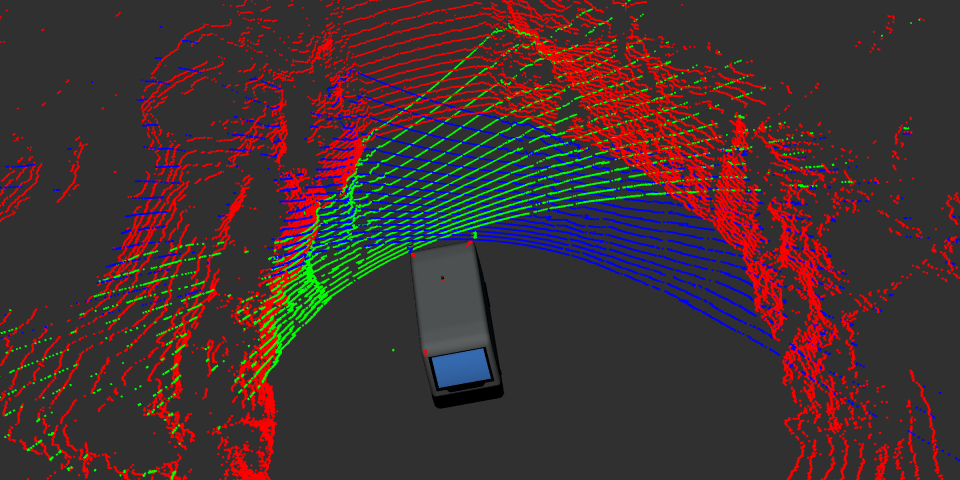
Percepción y calibración van de la mano
Los sensores permiten al vehículo ver lo que un humano puede ver, sin embargo esta tarea puede realizarse con múltiples sensores, y tras un procesamiento cuidadoso de los datos: Sonar, LiDAR, Cámaras, Radares, etc. Así, se pueden utilizar múltiples sensores, pero todos ellos necesitan ser calibrados ya que cualquiera será inútil si sus lecturas contienen muchos errores.
Sin embargo, es la reciente convergencia de la inteligencia artificial, los sensores avanzados y la informática potente lo que ha impulsado la tecnología de conducción autónoma a la vanguardia de la innovación automovilística. Como consecuencia, los recientes avances en electrónica y tecnologías de sensores han precipitado avances significativos en el desarrollo de sistemas de asistencia al conductor automatizados (ADAS), que han demostrado una mejora sustancial del rendimiento del conductor.
Toma de decisiones
Si realizamos una detección somos capaces de saber qué hacer a continuación.
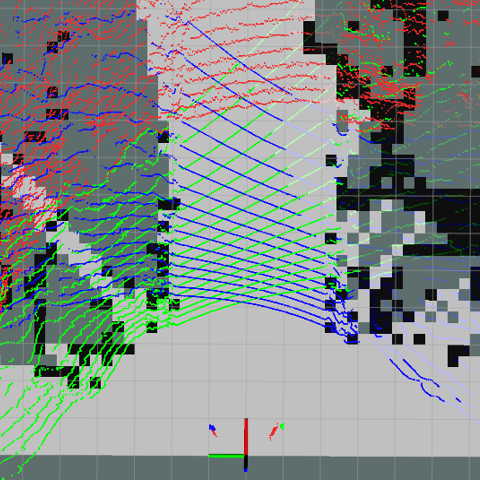
Mapeado
Disponer de un mapa es un buen método para detectar obstáculos o localizar el vehículo.
Posición de los sensores
La configuración y la posición del sensor influyen en la calidad de la cobertura.
03
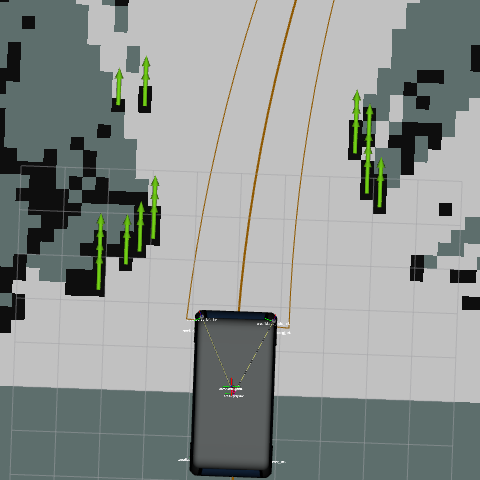
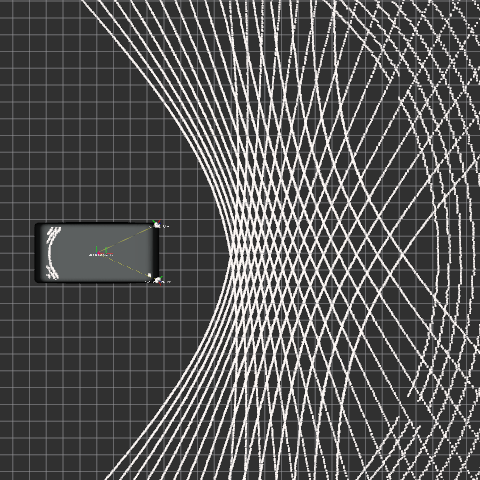
Cuando se procesa toda la información de los sensores el vehículo es capaz de detectar la mayor parte de los eventos que le rodean; esta información puede utilizarse para planificar por adelantado qué hacer a continuación. Puedes querer ir a un determinado punto evitando atascos o decidir generar un plan de paradas en ciertos puntos de interés.
Estas tareas se realizan a través de una abstracción de alto nivel llamada Planificación. Se pueden planificar movimientos específicos para decidir cómo mover el vehículo, tareas para decidir si hacer una determinada tarea u otra o incluso para intentar determinar qué hacer en un instante con toda la información de la que se dispone.

Integración de la información distribuida
La información que se recibe no sólo proviene de las lecturas de los sensores, sino que puede ser proporcionada por otros vehículos y sistemas de la infraestructura vial. Para tomar decisiones adecuadas es obligatorio disponer de información completa sobre el entorno. Y esto puede ser un problema en sí mismo.
Estas herramientas permiten a los vehículos comunicarse sin problemas, compartiendo datos en tiempo real para facilitar la toma de decisiones coordinadas y las maniobras automatizadas. El resultado es un ecosistema de transporte más eficiente, resistente y sostenible que da prioridad tanto a las personas como al planeta.
Mejoras
La planificación permite al vehículo generar comportamientos más complejos, ya que es capaz de inferir eventos futuros.
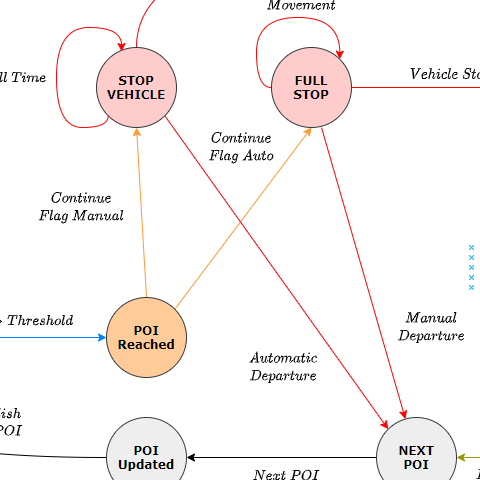
Máquinas de Estado
Problemas de decisión simples pueden resolverse con máquinas de estado finito, procesos de decisión de Markov o árboles de comportamiento.
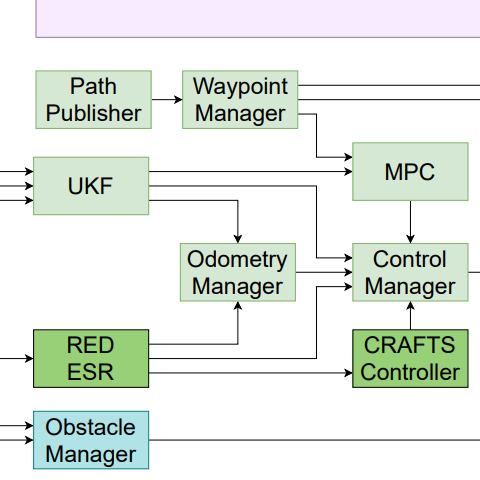
Integración
La integración de la información entre los módulos del sistema permite sincronizar los eventos y las decisiones del vehículo.
04
¿Conoce el refrán Dos no discuten si uno no quiere?, pues este es un paso importante en los procesos de comunicación entre los vehículos y la infraestructura vial. El estado del arte actual en cuanto a sistemas de comunicación se basa en sistemas distribuidos ubicuos que comparten información con todos los usuarios de la carretera. Pero… cómo los sistemas son capaces de trabajar con esa información y manipular los segmentos más importantes para decidir qué hacer a continuación; o incluso para ayudar a cualquier conductor humano que lo necesite.
Para que una comunicación tenga éxito hay cinco elementos obligatorios: Emisor, Receptor, Código, Mensaje y Canal; y estas líneas de investigación pretenden desarrollar mejores técnicas de gestionar la información vial.
infraestructura vial
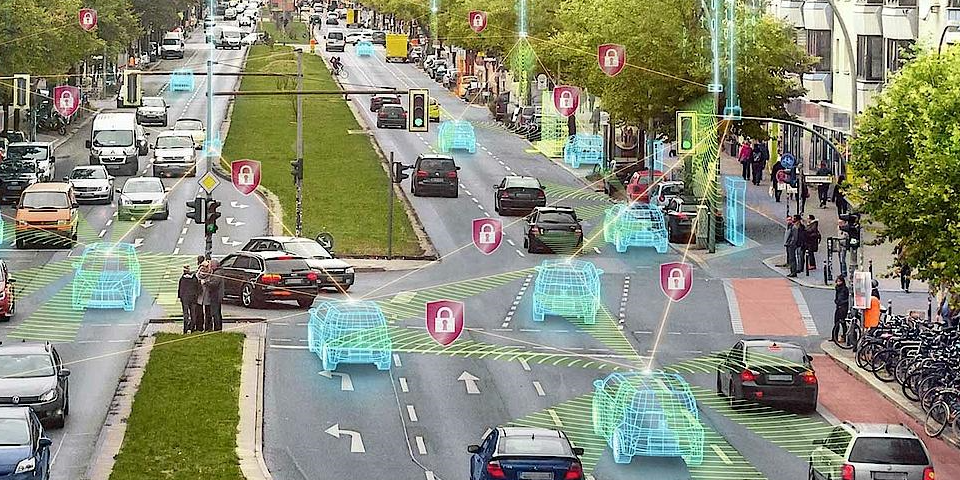
Un vehículo puede estar en comunicación con otro, pero ¿y la comunicación de la infraestructura?, que despliega sistemas de percepción para que los usuarios de la carretera tengan mucha más información sobre los alrededores de rotondas, intersecciones o accesos a las rampas de autopistas.
Por este motivo, además de la representación mundial, la combinación de redes ad hoc vehiculares (VANET) y redes ad hoc móviles (MANET) para crear redes dinámicas de difusión de información da lugar a un nuevo modelo de interacción entre componentes, centrado en la gestión de intersecciones, la planificación cooperativa de trayectorias, la formación de pelotones y la prevención de colisiones, muy útil en las ciudades inteligentes del futuro. Porque, más allá del paradigma convencional y egocéntrico de la conducción automatizada, está surgiendo una nueva frontera: la movilidad automatizada conectada y cooperativa (CCAM).

Rotondas
Las rotondas suponen un gran problema para un vehículo autónomo. Es una situación compleja en la que muchas cosas pueden salir mal si se toman las decisiones incorrectas.

Intersecciones
Las intersecciones pueden ser un entorno vial complejo, en el que hay que sincronizarse con todos los usuarios de la carretera.
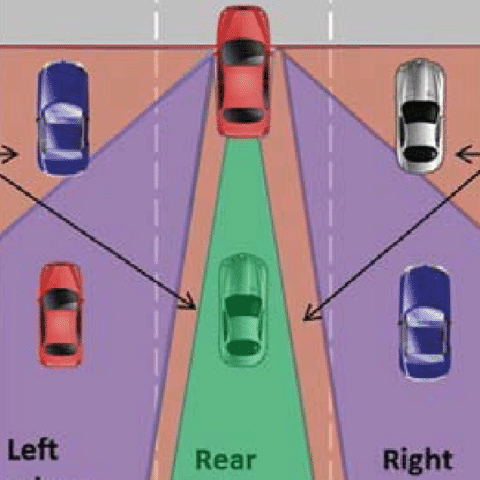
Puntos ciegos
Los ángulos muertos son peligrosos durante la conducción, tal vez algunos sistemas de asistencia sean capaces de hacer frente a estas situaciones y evitar accidentes.
Publicaciones
- Yagüe-Cuevas, D.; Marín-Plaza, P.; Lorente, M.P.-S.; Smith, S.F.; Sanchis, A.; Moreno, J.M.A. Mitigating Urban Congestion: A Cooperative Reservation Framework for Automated Vehicles. Appl. Sci. 2025, 15, 5347. Category: Engineering; IF: 2.0; Quartile: Q1; Category Ranking: 88/181. https://doi.org/10.3390/app15105347
- Yagüe-Cuevas, D.; Marín-Plaza, P.; Paz-Sesmero, M. and Sanchis, A. (2024). Mission Based Systems for Connected Automated Mobility. Robotics and Autonomous Systems, p. 104 772, 2024. Category: Automation and Control Systems; IF: 4.3; Quartile: Q1; Category Ranking: 21/84. https://doi.org/10.1016/j.robot.2024.104772.
- Yagüe-Cuevas, D.; Marín-Plaza, P.; Paz-Sesmero, M. and Sanchis, A. (2024). Organizing Planning Knowledge for Automated Vehicles and Intelligent Transportation Systems. IET Intelligent Transport Systems. ISSN:1751-9578. Category: Engineering, Electrical and Electronic; IF: 2.3; Quartile: Q2; Category Ranking: 175/352. http://doi.org/10.1049/itr2.12583.
- Yagüe-Cuevas, D. (2024); Towards a Cooperative Urban Ecosystem: Integrating ITS and CCAM Technologies for a Safer Future Mobility. Journal of Artificial Intelligence and Cloud Computing. 2024. Category: Computer Science, Artificial Intelligence; IF: 0.5; Quartile: Q4; Category Ranking: NA. Forthcoming. https://doi.org/10.47363/JAICC/2024(3)395.
- Marin-Plaza, P.; Yagüe-Cuevas, D.; Royo, F.; de Miguel, M.Á.; Moreno, F.M.; Ruiz-de-la-Cuadra, A.; Viadero-Monasterio, F.; Garcia, J.; San Roman, J.L.; Armingol, J.M. (2021); Project ARES: Driverless Transportation System. Challenges and Approaches in an Unstructured Road. Electronics 2021, 10,
1753. Category: Engineering, Electrical and Electronic; IF: 2.6; Quartile: Q3; Category Ranking: 115/249. https://doi.org/10.3390/electronics10151753. - Yagüe-Cuevas, D.; Marín-Plaza, P.; Paz-Sesmero, M. and Sanchis, A. (2024). Modeling the Traffic Scene in Intelligent Transport Systems for Cooperative Connected Automated Mobility. Communications in Computer and Information Science (CCIS). Smart Cities, Green Technologies, and Intelligent Transport Systems. Volume 1989. Springer. ISSN 1865-0929.
- Yagüe-Cuevas, D.; Marín-Plaza, P.; Paz-Sesmero, M. and Sanchis, A. (2024). Behavioral Based Decision-Making Scheme for Cooperative Connected Automated Mobility. In Proceedings of the 10th International Conference on Connected Smart Cities, 2024, pp. 99–107. Budapest, Hungary.
- Yagüe-Cuevas, D.; Marín-Plaza, P.; Paz-Sesmero, M. and Sanchis, A. (2023). Towards a Robust Traffic Scene Representation in Cooperative Connected Automated Mobility. In Proceedings of the 9th International Conference on Vehicle Technology and Intelligent Transport Systems, Prague, Czech Republic. ISBN 978-989-758-652-1, ISSN 2184-495X, pages 265-272.
- Yagüe-Cuevas, D.; Marín-Plaza, P.; Paz-Sesmero, M. and Sanchis, A. (2023). Nearest Pose Index Computation for Lateral Control in Autonomous Vehicles. In Proceedings of the 15th ITS European Congress. Lisbon, Portugal.
- Yagüe-Cuevas, D.; Paz-Sesmero, M; Marín-Plaza, P.; Smith. S.; Sanchis, A.; Armingol, José (2024). Multi-agent Simulation Scheme for Cooperative Connected Automated Mobility Based on ROS and Carla. In Proceedings of the 8th International Conference on Intelligent Traffic and Transportation. Florence, Italy.
- Jiménez, F.; Ramajo, A.; Yagüe-Cuevas, D.; Bemposta, D; Sánchez, S.; Armingol, J. M.; Fernández Andrés J.; Naranjo, J. E.; Sanchis, A.; Aliane, N. (2023); Organizing Connected and Autonomous Vehicles using a Distributed Decision Scheme. Fisita World Congress, Barcelona, España.
- Yagüe-Cuevas, D.; Ruíz-de-la-Cuadra A.; Marín-Plaza, P.; Armingol, J.M.; Optimización del Entorno de Simulación para el Depurado de Arquitectura Software en Vehículos Autónomos. CAEPIA IA-SIT 20/21.
- C, Castellanos Ormeño; D. Yagüe-Cuevas; P. Marín Plaza, and J. M. Armingol (2023); Generación de Trayectorias para Vehículos Autónomos en Entornos Urbanos. XLIV Jornadas de Automática. Universidade da Coruña. Servizo de Publicacións, pp. 539–544.
- Tornero Martín, D. Yagüe-Cuevas, J. M. Armingol, and A. d. l. Escalera (2023); Segmentación Semántica de Imágenes para Navegación de Vehículos Autónomos en Entornos Estructurados. XLIV Jornadas de Automática, Universidade da Coruña. Servizo de Publicacións, pp. 891–896.
- Ruíz-de-la-Cuadra A.; Yagüe-Cuevas, D.; Marín-Plaza, P.; Armingol, J.M.; Detección y Modelado de la Carretera Mediante el Análisis Morfológico de Nubes de Puntos. CAEPIA IA-SIT 20/21.
- Marin-Plaza, P.; Yagüe-Cuevas, D.; Armingol, J.M. Proyecto Ares: Vehículo Sin Conductor Para Entornos No Estructurados. Symposium SEGVAUTO-4.0-CM. Technologies for a Safe, Accesible and Sustainable Mobility. 17-18 November 2021, Madrid.
- P. Marín, M. Garrosa, A. San Román, D. Yagüe y J. L. San Román, «Sistema De Frenado Con Elementos De Bajo Coste En Automatización De Vehículos Para Zonas Turísticas Sin Tráfico Mixto.» de XV Congreso Iberoamericano de Ingeniería Mecánica, Madrid, 2022.