
Research Lines
01
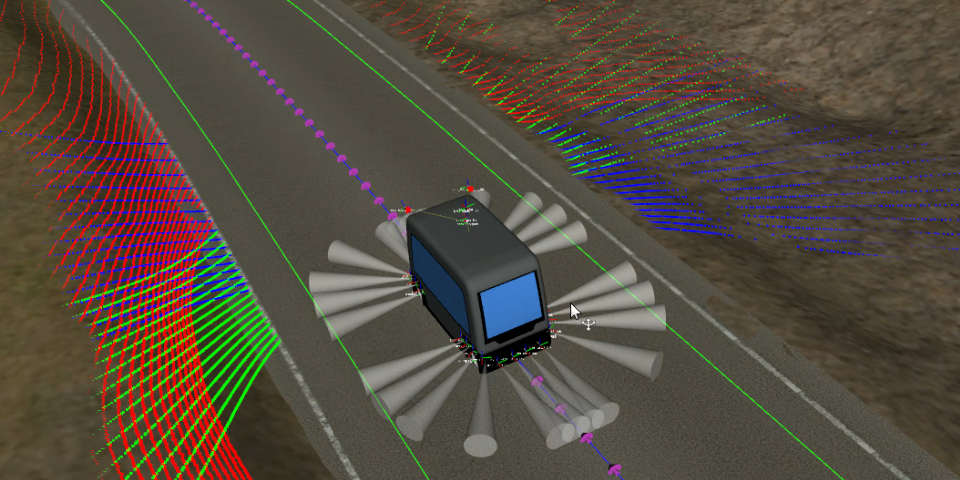
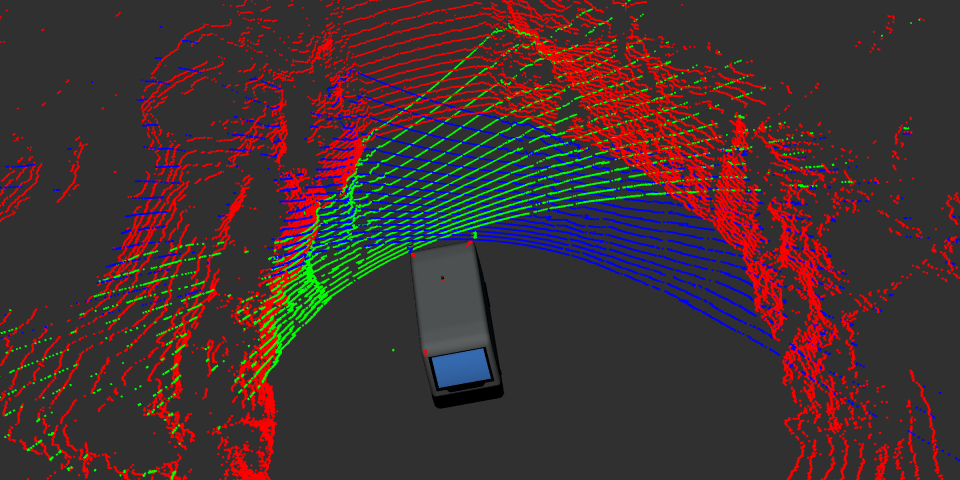
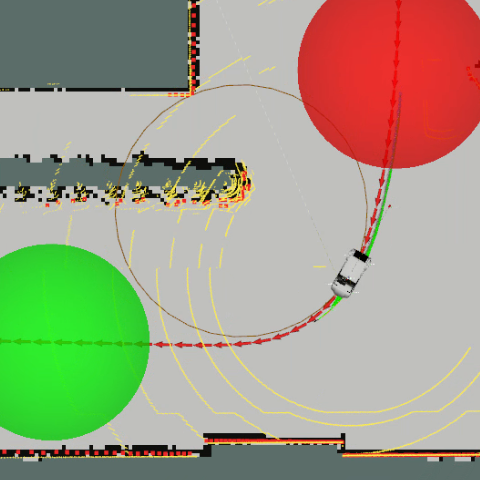
The nature of rural environments where the driverless vehicles will be deployed include the absence of surrounding buildings, structured roads, signals and clear skies. For this reason a set of localization paradigms must be used to produce high accuracy localization readings. One of the most important is the GNSS based localization, with RTK or Differencial corrections since obstacles and mountains can decrease the accuracy of the sensor readings.
Another methods comprise LiDAR readings and Offline map comparison or Visual Odometry using information extracted from Cameras.
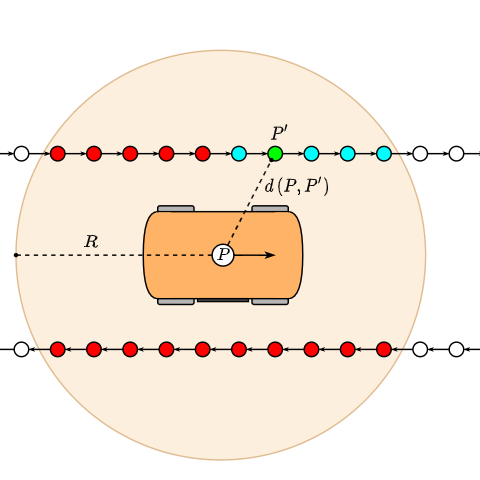
Good Localization Means good control
A good localization provides the ego-vehicle with enough information to be controlled properly and solve small decission problems on what to do next.
This technology, rooted in mobile robotics, positions automated mobility as a cornerstone of future transportation, addressing challenges such as traffic congestion, road accidents and passenger experience. Mainly, becacause is the first problem to solve if the vehicle needs to know the start and goal points for planning, decision making and perception control.
Robot Description
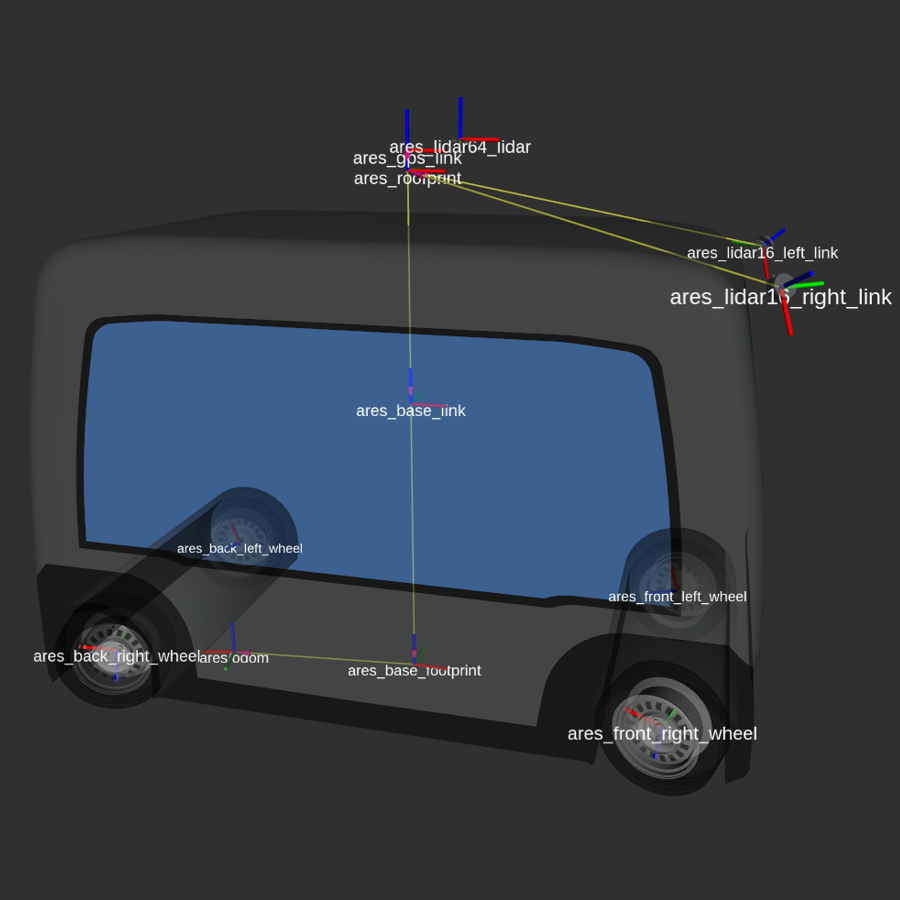
To localize a vehicle you must have a set of frames to know where each part of the vehicle is: Wheels, Sensors, etc.
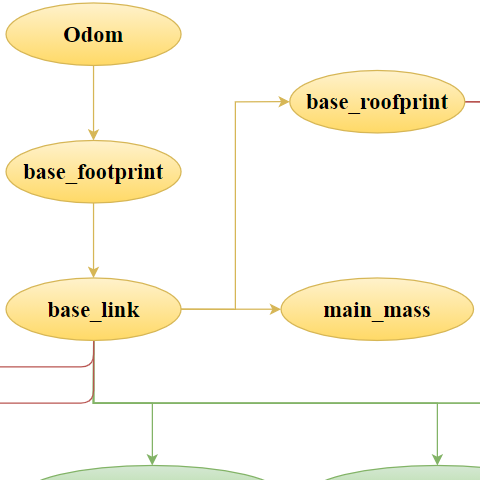
Tree FRames
Tree frames allow us to know the relationship between coordinate frames in a tree structure buffered in time.
Localization with respect...
All measures are relative to the frame where the reading was recorded. They must be processed to a global frame.
02
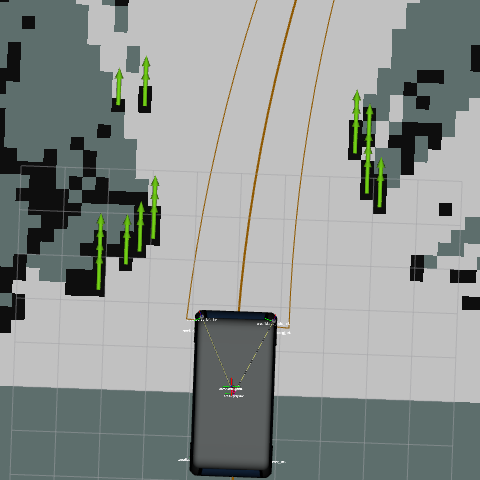
The understanding and interpretation of the traffic scene, in which a moving vehicle is located, turned out to be a complex goal and inevitably requires an advanced inference process. It must begin with a reliable perception of the various agents that are part of the scene (vehicles, pedestrians, obstacles, etc.) as well as the characteristics of the infrastructure in which the vehicle moves (road limits, geometry of the intersections, etc.).
In order to solve these problems one can use Computer Vision and LiDAR Technology approaches. This includes tasks like Mapping, Obstacle detection, Road detection and data processing in general allowing the vehicle to know what it is in the sorrundings.
With perception there is always calibration
Sensors allow the ego-vehicle to see what a human can see, however this task can be done with multiple sensors. Sonar, LiDAR, Cameras, Radars, etc. Multiple approaches can be used, but all of them need to be calibratated since any sensor will be useless if its readings contains errors.
However, it is the recent convergence of artificial intelligence, advanced sensors, and powerful computing that has propelled self-driving technology into the forefront of automotive innovation. As a consequence, recent advancements in electronics and sensor technologies have precipitated significant strides in the development of automated driver assistance systems (ADAS) which have demonstrated a substantial enhancement of driver performance.
Decision Making
If we perform a detection we are able to know what to do next.
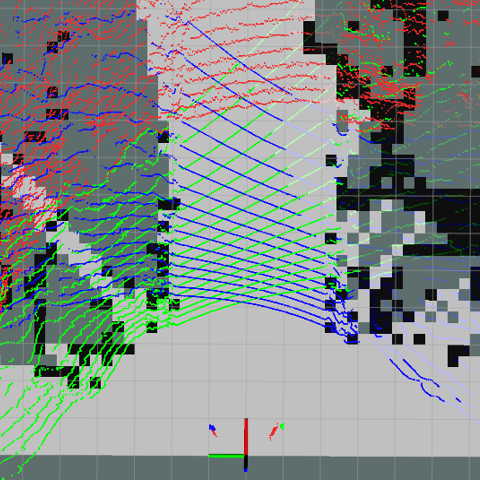
Mapping
Having a map is a good approach to detect obstacles or localize the vehicle.
Sensor Positioning
The configuration and position of the sensor influence the quality of coverage.
03
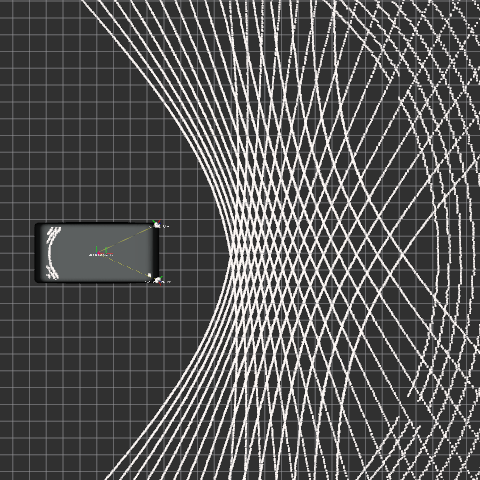
When all sensor information is processed and the ego-vehicle is able to detect most of the sorrounding events, this information can be used to plan in advance what to do next. You may want to go to a certain point avoiding traffic jams or decide to implment a point of interest stop plan.
Those task are performed in a high level abstraction called Planning. It can be motion planning to decide how to move the vhicle, Task planning to decide whether to do a certain task or another or even decision making problems: what to do now with all the information that I have.

Integration of distributed information
The information received does not only come from sensor readings, it can be provided by other vehicles and road infrastructure systems. To make proper decisions is compulsory to have complete information about the enviroment.
These tools empower vehicles to communicate seamlessly, sharing real-time data to enable coordinated decision-making and automated maneuvers. The result is a more efficient, resilient, and sustainable transportation ecosystem that prioritizes both people and the planet.
Enhancement
Planification allows the vehicle to produce more complex behaviours since it is able to infer events.
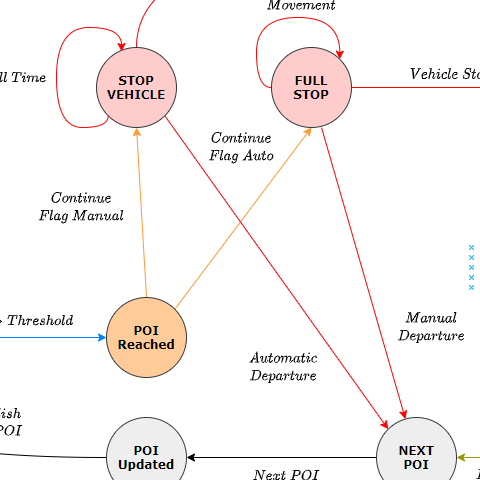
state machines
Decision problems can be solved with finite state machines, Markov decision processes or behavior trees.
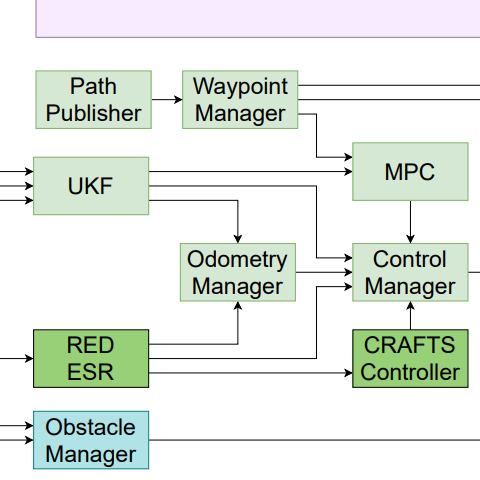
INtegration
Information integration between systems modules allows the vehicle to synchronize events and decisions.
04
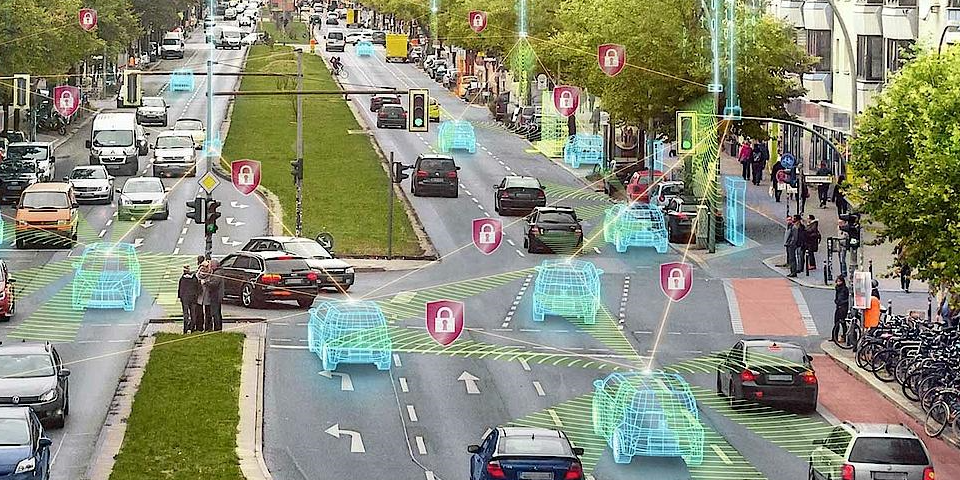
Do you know the old say Two do not argue if one does not want to?, because this is an important step in the communication processes between vehicles and road infrastructure. The state of the Art nowadays regarding Communication systems are based on ubiquitous distributed system that share information with all road users. But… how the systems are able to work with that information and manipulate the most important bits to decide what to do next or help any human driver in need.
For a communication to be succeed there are five compulsory needs: Sender, Receiver, Code, Message and Channel; and these research lines aim to develop better ways to manage road information.
ROAD infrastructure
A vehicle can be in communication with another, but what about infrastructure communication that deploys perception systems to allow road users to have plenty of information about the sorrounding of roundabouts, intersections or highway ramp accesses.
For this reason, in addition to world representation, the combination of Vehicular Ad-Hoc Networks (VANETs) and Mobile Ad-Hoc Networks (MANETs) to build dynamic networks for information dissemination yield a new model of interaction between components, focused on intersection management, cooperative trajectory planning, platooning, and collision avoidance, very useful in future smart cities. Because, beyond the conventional, self-centered paradigm of automated driving, a new frontier is emerging: cooperative connected automated mobility (CCAM).

Roundabouts
Roundabouts entail a big problem for a self-driving vehicle. It is a complex situation i which a lot of things can go wrong if bad decision are made.

Intersections
Intersections can be a complex road environment, in which you have to synchronize with all road users.
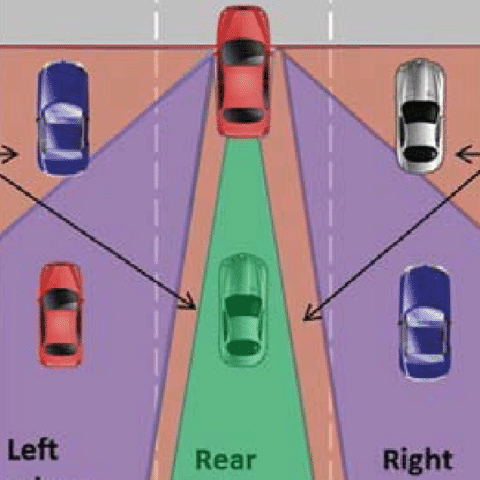
Blind spots
Blind spots are dangerous while driving, maybe some assistants system are able to cope with these situations and avoid accidents.
Publications
- Yagüe-Cuevas, D.; Marín-Plaza, P.; Lorente, M.P.-S.; Smith, S.F.; Sanchis, A.; Moreno, J.M.A. Mitigating Urban Congestion: A Cooperative Reservation Framework for Automated Vehicles. Appl. Sci. 2025, 15, 5347. Category: Engineering; IF: 2.0; Quartile: Q1; Category Ranking: 88/181. https://doi.org/10.3390/app15105347
- Yagüe-Cuevas, D.; Marín-Plaza, P.; Paz-Sesmero, M. and Sanchis, A. (2024). Mission Based Systems for Connected Automated Mobility. Robotics and Autonomous Systems, p. 104 772, 2024. Category: Automation and Control Systems; IF: 4.3; Quartile: Q1; Category Ranking: 21/84. https://doi.org/10.1016/j.robot.2024.104772.
- Yagüe-Cuevas, D.; Marín-Plaza, P.; Paz-Sesmero, M. and Sanchis, A. (2024). Organizing Planning Knowledge for Automated Vehicles and Intelligent Transportation Systems. IET Intelligent Transport Systems. ISSN:1751-9578. Category: Engineering, Electrical and Electronic; IF: 2.3; Quartile: Q2; Category Ranking: 175/352. http://doi.org/10.1049/itr2.12583.
- Yagüe-Cuevas, D. (2024); Towards a Cooperative Urban Ecosystem: Integrating ITS and CCAM Technologies for a Safer Future Mobility. Journal of Artificial Intelligence and Cloud Computing. 2024. Category: Computer Science, Artificial Intelligence; IF: 0.5; Quartile: Q4; Category Ranking: NA. Forthcoming. https://doi.org/10.47363/JAICC/2024(3)395.
- Marin-Plaza, P.; Yagüe-Cuevas, D.; Royo, F.; de Miguel, M.Á.; Moreno, F.M.; Ruiz-de-la-Cuadra, A.; Viadero-Monasterio, F.; Garcia, J.; San Roman, J.L.; Armingol, J.M. (2021); Project ARES: Driverless Transportation System. Challenges and Approaches in an Unstructured Road. Electronics 2021, 10,
1753. Category: Engineering, Electrical and Electronic; IF: 2.6; Quartile: Q3; Category Ranking: 115/249. https://doi.org/10.3390/electronics10151753. - Yagüe-Cuevas, D.; Marín-Plaza, P.; Paz-Sesmero, M. and Sanchis, A. (2024). Modeling the Traffic Scene in Intelligent Transport Systems for Cooperative Connected Automated Mobility. Communications in Computer and Information Science (CCIS). Smart Cities, Green Technologies, and Intelligent Transport Systems. Volume 1989. Springer. ISSN 1865-0929.
- Yagüe-Cuevas, D.; Marín-Plaza, P.; Paz-Sesmero, M. and Sanchis, A. (2024). Behavioral Based Decision-Making Scheme for Cooperative Connected Automated Mobility. In Proceedings of the 10th International Conference on Connected Smart Cities, 2024, pp. 99–107. Budapest, Hungary.
- Yagüe-Cuevas, D.; Marín-Plaza, P.; Paz-Sesmero, M. and Sanchis, A. (2023). Towards a Robust Traffic Scene Representation in Cooperative Connected Automated Mobility. In Proceedings of the 9th International Conference on Vehicle Technology and Intelligent Transport Systems, Prague, Czech Republic. ISBN 978-989-758-652-1, ISSN 2184-495X, pages 265-272.
- Yagüe-Cuevas, D.; Marín-Plaza, P.; Paz-Sesmero, M. and Sanchis, A. (2023). Nearest Pose Index Computation for Lateral Control in Autonomous Vehicles. In Proceedings of the 15th ITS European Congress. Lisbon, Portugal.
- Yagüe-Cuevas, D.; Paz-Sesmero, M; Marín-Plaza, P.; Smith. S.; Sanchis, A.; Armingol, José (2024). Multi-agent Simulation Scheme for Cooperative Connected Automated Mobility Based on ROS and Carla. In Proceedings of the 8th International Conference on Intelligent Traffic and Transportation. Florence, Italy.
- Jiménez, F.; Ramajo, A.; Yagüe-Cuevas, D.; Bemposta, D; Sánchez, S.; Armingol, J. M.; Fernández Andrés J.; Naranjo, J. E.; Sanchis, A.; Aliane, N. (2023); Organizing Connected and Autonomous Vehicles using a Distributed Decision Scheme. Fisita World Congress, Barcelona, España.
- Yagüe-Cuevas, D.; Ruíz-de-la-Cuadra A.; Marín-Plaza, P.; Armingol, J.M.; Optimización del Entorno de Simulación para el Depurado de Arquitectura Software en Vehículos Autónomos. CAEPIA IA-SIT 20/21.
- C, Castellanos Ormeño; D. Yagüe-Cuevas; P. Marín Plaza, and J. M. Armingol (2023); Generación de Trayectorias para Vehículos Autónomos en Entornos Urbanos. XLIV Jornadas de Automática. Universidade da Coruña. Servizo de Publicacións, pp. 539–544.
- Tornero Martín, D. Yagüe-Cuevas, J. M. Armingol, and A. d. l. Escalera (2023); Segmentación Semántica de Imágenes para Navegación de Vehículos Autónomos en Entornos Estructurados. XLIV Jornadas de Automática, Universidade da Coruña. Servizo de Publicacións, pp. 891–896.
- Ruíz-de-la-Cuadra A.; Yagüe-Cuevas, D.; Marín-Plaza, P.; Armingol, J.M.; Detección y Modelado de la Carretera Mediante el Análisis Morfológico de Nubes de Puntos. CAEPIA IA-SIT 20/21.
- Marin-Plaza, P.; Yagüe-Cuevas, D.; Armingol, J.M. Proyecto Ares: Vehículo Sin Conductor Para Entornos No Estructurados. Symposium SEGVAUTO-4.0-CM. Technologies for a Safe, Accesible and Sustainable Mobility. 17-18 November 2021, Madrid.
- P. Marín, M. Garrosa, A. San Román, D. Yagüe y J. L. San Román, «Sistema De Frenado Con Elementos De Bajo Coste En Automatización De Vehículos Para Zonas Turísticas Sin Tráfico Mixto.» de XV Congreso Iberoamericano de Ingeniería Mecánica, Madrid, 2022.